- tél. :+86-13222111178
- e-mail :info@ntjugao.com






Diagnostic rapide et gestion des défauts d'alarme dans la série ET
Diagnostic rapide et gestion des défauts d'alarme dans la série ET

Vous rencontrez des problèmes d’alarme sur votre cintreuse servo tout électrique de la série ET ? Vous êtes au bon endroit. Cet article vous fournira un guide détaillé pour diagnostiquer rapidement les problèmes d’alarme de la série ET, garantissant des opérations de production fluides et efficaces. Bien que les alarmes de la série ET soient courantes, avec la bonne approche, vous pouvez les résoudre rapidement et rétablir les performances optimales de votre équipement. Que vous soyez novice sur ce système ou que vous cherchiez à optimiser votre processus de dépannage, ce guide vous présentera les étapes clés pour traiter efficacement divers problèmes d’alarme.
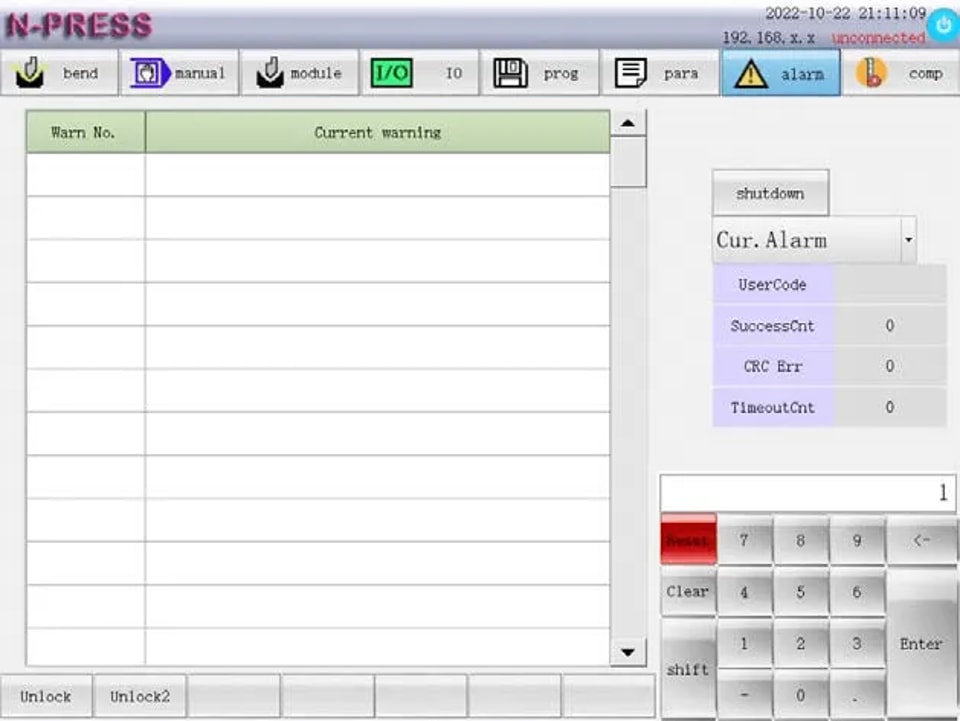
Étape 1 : Accéder à la série ET Interface des alarmes
Cliquez sur la touche de fonction « alarme » pour accéder à l’interface et consulter tous les détails des alarmes de la série ET. Cette interface affiche de manière complète les alarmes en cours, les enregistrements d’alarmes et d’autres statistiques cruciales telles que le nombre de succès, les erreurs de vérification et les temps de dépassement.
Analyser les enregistrements d’alarmes
Comprenez la fréquence et le type d’alarmes en consultant les enregistrements passés. Portez une attention particulière au nombre d’erreurs de vérification et de problèmes de dépassement de délai des alarmes de la série ET, car ils indiquent des problèmes de communication sous-jacents avec le module IO.
l Nombre de succès : Reflète le nombre de communications réussies entre le système et le module IO, indiquant l’état général de la communication du système.
l Erreurs de vérification : Affiche le nombre d’erreurs de vérification dans la communication des données entre le système et le module IO. Un nombre élevé d’erreurs peut indiquer des problèmes d’intégrité des données nécessitant une attention immédiate.
l Temps de dépassement : Indique le nombre d’erreurs de connexion de communication entre le système et le module IO, signalant d’éventuelles perturbations dans le transfert de données pouvant affecter le fonctionnement de la machine.
Étape 2 : Interpréter l’état des alarmes de la série ET Alarmes
Pour traiter efficacement l’alarme de la série ET, vérifiez d’abord les informations d’alarme pour les codes d’erreur (ERRxxx) et d’avertissement (ALMxxx). Les alarmes les plus récentes sont indiquées comme « alarme en cours ». Suivez les instructions pour résoudre les problèmes et appuyez sur la touche de réinitialisation pour effacer l’alarme et rétablir le fonctionnement normal du système.
En cas de panne du système CNC, les alertes afficheront jusqu’à cinq alarmes en cours. Notez le code d’avertissement et prenez les mesures recommandées, ou contactez un personnel de maintenance professionnel si nécessaire.
En suivant ces étapes, vous pouvez diagnostiquer rapidement les alarmes de la série ET, réduire les temps d’arrêt et augmenter la productivité.
Étape 3 : Résoudre les problèmes d’alarme de la série ET Problèmes d’alarme
Alarme de la série ET- Code d’erreur
ERR001 : alarme de rideau lumineux de sécurité
Cause : Lorsque l’axe Y se déplace vers le bas, le corps humain ou d’autres objets pénètrent dans la zone du rideau lumineux.
Traitement :Vérifiez si quelqu’un se trouve dans la zone du rideau lumineux ou si la grille de sécurité est en panne.
ERR002 : Déviation de position des axes Y1 et Y2
(L’alarme sera déclenchée lorsqu’elle se produit en mode manuel, et elle sera également déclenchée lorsqu’elle se produit pendant le pliage.)
Cause :La déviation de la valeur de coordonnées absolues des axes Y1 et Y2 dépasse la valeur maximale de déviation réglée pour l’axe Y.
Traitement :Vérifiez d’abord si l’erreur de position des axes Y1 et Y2 est hors tolérance. Ensuite, vérifiez si l’encodeur linéaire fonctionne correctement ou s’il est défectueux. Enfin, examinez s’il y a une défaillance de la transmission mécanique et si la valeur admissible de la déviation de position des paramètres système Y1 et Y2 est réglée trop bas.
ERR003 : Alarme lorsque la pression dépasse la valeur maximale admissible de la machine-outil
Cause :Mauvais moule ou mauvais matériau sélectionné.
Traitement :
1. Vérifier la sélection du moule et du matériau :
l Assurez-vous que le moule et le matériau sont correctement sélectionnés.
2. Vérifier la pression de pliage :
l Vérifiez si la pression de pliage dans le programme, la synthèse et l’interface de programmation est trop élevée.
3. Évaluation de la pression :
l Si la pression affichée dépasse la limite admissible de la machine-outil :
l Remplacez le moule ou le matériau.
l Si la pression affichée est dans la plage admissible :
l Vérifiez que le réglage des hauteurs des matrices supérieure et inférieure est correct.
ERR004 : Alarme lorsque la pression dépasse la valeur admissible du moule
Cause: Mauvais moule ou mauvais matériau sélectionné.
Traitement:
1. Vérifiez si le moule et le matériau sont correctement sélectionnés.
2. Vérifiez si la pression de pliage dans le programme, la synthèse et l’interface de programmation est trop élevée.
l Si la pression affichée dépasse la pression admissible du moule, remplacez le moule ou le matériau.
l Si la pression affichée se situe dans la plage admissible du moule, assurez-vous que les hauteurs du moule supérieur et du moule inférieur sont correctement réglées.
ERR005 : Dépassement de la limite de pression de pliage
Cause: Mauvais moule ou mauvais matériau sélectionné.
Traitement :
1. Vérifiez si le moule et le matériau sont correctement sélectionnés.
2. Vérifiez si la pression de pliage dans le programme, la synthèse et l’interface de programmation est trop élevée.
3. Si la pression affichée dépasse la pression admissible du moule, veuillez remplacer le moule ou le matériau.
4. Si la pression affichée se situe dans la plage admissible du moule, assurez-vous que les hauteurs du moule supérieur et du moule inférieur sont correctement réglées.
ERR006 : Dépassement du délai de communication de détection de pression
Cause :Délai de communication entre le système et la carte IO dépassé.
Traitement :Assurez-vous que le type de carte IO est correctement réglé et que les connexions de la ligne de communication 485 sont correctes.
ERR007 : Défaut du canal de détection de pression
Cause :La valeur analogique est trop faible.
Traitement :Confirmez que les connexions de la ligne de signal analogique sont correctes.
ERR008-ERR12 : fin de course dur en surcourse positive de l’axe X-Z2
(L’alarme sera déclenchée pendant le pliage ; l’alarme sera déclenchée lorsque le mode manuel est activé)
Cause :Le fin de course positif de chaque axe est déclenché pendant le pliage.
Traitement :
1. Vérifiez si chaque axe est entré dans la zone du fin de course positif.
2. Vérifiez si le fin de course positif de chaque axe est défectueux.
3. Utilisez l’interface de commande manuelle pour déplacer chaque axe hors de la zone du fin de course.
ERR013-ERR017 : l’axe X-Z1 dépasse la limite dure négative
(L’alarme sera déclenchée pendant le pliage et la recherche du point zéro ; l’alarme sera déclenchée lorsque le mode manuel est activé)
CauseLe contacteur de fin de course négative de chaque axe est déclenché pendant le pliage.
Traitement :
1. Déplacez chaque axe dans l’interface de commande manuelle pour quitter la zone du contacteur de fin de course.
2. Vérifiez si chaque axe entre dans la zone du contacteur de fin de course négative.
3. Vérifiez si le contacteur de fin de course négative de chaque axe est défaillant.
ERR018-ERR022 : Dépassement de la butée logicielle positive de l’axe X-Z2
Cause :La position machine de chaque axe dépasse la position de limite logicielle positive définie par le paramètre système.
Traitement :Vérifiez si la position de limite logicielle positive de chaque axe définie par le paramètre système est appropriée.
ERR023-ERR027 : Dépassement de la butée logicielle négative de l’axe X-Z1
Cause :La position machine de chaque axe dépasse la position de limite logicielle négative définie par le paramètre système.
Traitement :Vérifiez si la position de limite logicielle négative de chaque axe définie par le paramètre système est appropriée.
ERR028 : Alarme de péremption de la machine-outil
Cause :La machine-outil est arrivée à échéance.
Traitement :Veuillez contacter le fournisseur.
ERR029-ERR034 : Alarme du servo-variateur de chaque axe
Cause :Le servo-variateur de l’axe correspondant déclenche une alarme ou la connexion du servo-variateur échoue.
Traitement :Vérifiez la cause de l’alarme du servo-variateur ou contrôlez le câble de connexion entre le système et le servo-variateur.
ERR035-ERR040 : Alarme d’encodeur de chaque axe
Cause :Le signal de l’encodeur de l’axe correspondant est incorrect.
Traitement :Vérifiez le câblage des signaux liés à l’encodeur du câble de connexion entre le système et le servo-variateur.
ERR041-ERR046 : Alarme anormale du servo de chaque axe en mode sans mouvement
Cause :Lorsque l’axe correspondant ne reçoit pas la commande de mouvement, il détecte que les coordonnées renvoyées sont anormales.
Traitement :Vérifiez le câble de connexion de l’encodeur.
ERR047-ERR052 : Alarme anormale du servo de chaque axe en mode mouvement
Cause :Alarme de suivi de position de chaque axe.
Traitement :Vérifiez si la valeur admissible de l’erreur de suivi de position est réglée trop bas.
ERR053 : Alarme de panne d’alimentation
Cause :La tension d’alimentation du système est détectée comme trop faible.
Traitement :Vérifiez si l’alimentation électrique est normale.
ERR054 : Alarme système
Cause :Exception interne du système.
Traitement :Veuillez contacter le fournisseur.
ERR055 : Alarme d’arrêt d’urgence
Cause :Il est détecté que le bouton d’arrêt d’urgence est enfoncé.
Traitement :Vérifiez si le bouton d’arrêt d’urgence est enfoncé.
ERR056 : Couple limité
Cause :Le couple maximal du moteur est dépassé.
Traitement :Vérifiez si la vitesse ou l’accélération de l’axe Y est réglée trop élevée.
ERR057 : L’écart entre Z1 et Z2 est trop faible
Cause :Le déplacement de l’axe Z en commande manuelle dépasse la distance de sécurité du paramètre système 603 : z1z2.
Traitement :Vérifiez si les paramètres définis par le système sont appropriés.
ERR059 : Avertissement de dépassement de délai
Cause :Le temps d’utilisation du système est inférieur à 2 jours.
Traitement :Contactez le fournisseur.
ERR060 : Limite logicielle négative dépassée pour le pignon arrière 2
Cause :Lors de l’utilisation du pignon arrière 2, la coordonnée machine de l’axe X dépasse la position de limite logicielle négative de l’axe X définie par le paramètre système.
Traitement :Vérifiez si le pignon arrière est correctement sélectionné.
ERR061 : Alarme de porte de sécurité
Cause :La porte de sécurité a été ouverte pendant l’utilisation.
Traitement :Vérifiez que la porte de sécurité est bien fermée.
ERR062 : Alarme de climatisation
Cause :Défaillance du climatiseur.
Traitement :Vérifiez le climatiseur.
ERR063 : Temporisation de compensation de flexion
Cause :La compensation de flexion ne peut pas être terminée depuis longtemps.
Traitement :Vérifiez si la précision de compensation de flexion est réglée trop bas.
ERR064 : Erreur de sens de compensation de flexion
Cause :Erreur de sens de rotation du moteur de compensation de flexion.
Traitement :Vérifiez si le câblage du moteur de compensation de flexion est correct.
ERR065 : Alarme d’arrêt d’urgence 1
Cause :Le signal d’entrée de l’alarme d’arrêt d’urgence 1 est actif.
Traitement :Vérifiez le signal d’entrée de l’alarme d’arrêt d’urgence 1.
Alarme de la série ET-Code d’alarme
ALM001-ALM006 Échec de la recherche du point d’origine des axes X-Z2
Cause: Le système ne détecte pas le signal d’origine de l’axe correspondant pendant la recherche, ou la coordonnée d’origine de l’axe correspondant est mal réglée.
Traitement: Vérifiez si la distance de recherche de la troisième section de l’axe correspondant dans les paramètres système est inférieure à un pas. Vérifiez également les coordonnées d’origine de l’axe correspondant.
ALM007-ALM011 Dépassement de la butée dure positive extrême des axes X-Z2
Cause: Le fin de course positif de l’arbre correspondant est déclenché en mode manuel.
Traitement: Vérifiez si l’arbre correspondant entre dans la zone du fin de course positif ou si le fin de course positif de l’arbre est défaillant. Déplacez l’axe correspondant dans l’interface de commande manuelle pour sortir de la zone du fin de course.
ALM012-ALM016 Dépassement de la butée dure négative extrême des axes X-Z1
Cause: Le fin de course négatif de l’arbre correspondant est déclenché en mode manuel.
Traitement: Vérifiez si l’arbre correspondant entre dans la zone du fin de course négatif ou si le fin de course négatif de l’arbre est défaillant. Déplacez l’axe correspondant dans l’interface de commande manuelle pour sortir de la zone du fin de course.
ALM017-ALM021 Dépassement de la butée logicielle positive extrême des axes X-Z2
Cause: La butée logicielle avant de l’arbre correspondant est déclenchée en mode manuel.
Traitement: Déplacez l’axe correspondant dans l’interface de commande manuelle pour sortir de la butée logicielle, et vérifiez si le réglage de butée logicielle dans les paramètres système est approprié.
ALM022-ALM026 Dépassement de la butée logicielle négative des axes X-Z1
Cause: La butée logicielle négative de l’axe correspondant est déclenchée en mode manuel.
Traitement: Déplacez l’axe correspondant dans l’interface de commande manuelle pour sortir de la butée logicielle, et vérifiez si le réglage de butée logicielle dans les paramètres système est approprié.
ALM027 La déviation de position des axes Y1 et Y2 dépasse la limite
Cause: L’écart de la valeur absolue de la coordonnée des axes Y1 et Y2 dépasse la valeur maximale de déviation définie pour l’axe Y en mode manuel.
Traitement: Vérifiez si l’erreur de position des axes Y1 et Y2 est hors tolérance ; vérifiez si l’encodeur linéaire est défaillant ; contrôlez si la transmission mécanique présente une panne. Déplacez Y1 et Y2 dans une direction qui réduit la déviation de position axiale.
ALM028-ALM033 La déviation de position zéro de l’axe X-Z2 dépasse la limite
Cause: En mode point de référence, la valeur de coordonnée machine de l’axe correspondant après la recherche de l’origine est nettement différente de la valeur enregistrée dans les paramètres système 260-263608-609.
TraitementVérifiez que les paramètres système 260-263 et 608-609 sont correctement réglés.
Alerte de pompe de lubrification ALM034
CauseLa pression de sortie de la pompe de lubrification est insuffisante.
TraitementVérifiez si la graisse de lubrification est épuisée. Si c’est le cas, ajoutez de la graisse lubrifiante à base de lithium extrême pression n° 00. Sinon, vérifiez si la pompe de lubrification fonctionne normalement, si la conduite de lubrification fuit et si le câble de signal de la pompe de lubrification est correctement raccordé.
Outil non serré ALM035
CauseAucun signal de serrage du porte-outil hydraulique n’a été détecté.
TraitementVérifiez si le câblage du signal de serrage du porte-outil hydraulique est correct.
Espacement ZLZ2 trop faible ALM036
CauseL’axe Z en mode de commande manuelle dépasse la distance de sécurité du paramètre système 603 : z1z2.
TraitementVérifiez si les paramètres définis dans les paramètres système sont appropriés.
Alerte de rideau lumineux de sécurité ALM037
CauseLe signal du rideau lumineux est détecté comme valide.
TraitementVérifiez si le rideau lumineux est obstrué.
Alerte de dépassement de délai ALM038
CauseLe temps d’utilisation restant du système est inférieur à 2 jours.
TraitementContactez le fournisseur.
Limite positive de compensation de flèche ALM039
CauseLe mécanisme de compensation de flèche dépasse la limite positive.
TraitementVérifiez le sens de déplacement du mécanisme de compensation de flèche et si le raccordement du signal de fin de course est correct.
Limite négative de compensation de flèche ALM040
CauseLe mécanisme de compensation de flèche dépasse la limite négative.
TraitementVérifiez le sens de déplacement du mécanisme de compensation de flèche et si le raccordement du signal de fin de course est correct.
Compensation de flèche ALM041
CauseInvite de compensation de flèche.
TraitementVérifiez si le réglage de la précision de compensation de flèche est trop faible.
Inclinaison de l’axe Y ALM042
CauseLe signal d’entrée d’inclinaison de l’axe Y est valide.
TraitementVérifiez si Y1Y2 est parallèle et si le réglage de l’origine est correct.
Conclusion
En résumé, la clé pour dépanner rapidement les alarmes de matrice de la série ET consiste à maîtriser les étapes essentielles permettant d’identifier et de résoudre efficacement les pannes courantes. En suivant les procédures décrites dans cet article — comme la vérification des raccordements, l’étalonnage des paramètres système et l’entretien courant — vous pourrez réduire au minimum les arrêts de production et garantir l’efficacité de la fabrication.
Pour toute assistance complémentaire ou pour obtenir des informations techniques plus détaillées, n’hésitez pas à contacter notre équipe d’assistance technique, JUGAO CNC MACHINE. Nous sommes prêts à vous fournir des conseils professionnels et des ressources supplémentaires pour vous aider à utiliser nos produits plus efficacement. Vous pouvez également consulter nos autres documents techniques pour plus d’informations sur la maintenance des machines de pliage et l’optimisation des performances.
