- tél. :+86-13222111178
- e-mail :info@ntjugao.com






Quels sont les principaux composants d’un robot de soudage ?
Quels sont les principaux composants d’un robot de soudage ?

Les robots de soudage sont des équipements de soudage courants et largement utilisés dans le domaine du soudage. Par rapport au soudage traditionnel, ils sont beaucoup plus rapides. Un robot de soudage se compose principalement de deux parties : le corps du robot et l’équipement de soudage automatisé. Les robots de soudage sont des dispositifs modernes et automatisés intégrant l’informatique, l’électronique, les capteurs, l’intelligence artificielle et d’autres technologies. Ils permettent facilement d’obtenir des résultats de soudage stables et améliorés, assurant une production continue 24 h/24, augmentant considérablement l’efficacité de production et remplaçant le travail manuel dans des environnements dangereux sur de longues périodes. Les robots de soudage utilisés directement pour le soudage comprennent ceux destinés au soudage à l’arc électrique, au soudage par résistance et au soudage au gaz.
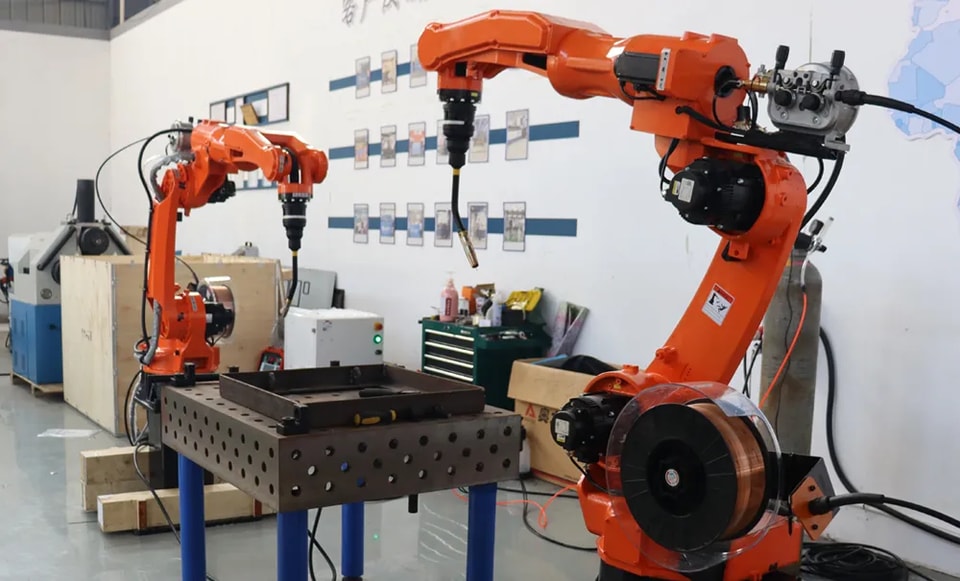
Robots de soudage
I. Composants d’un robot de soudage
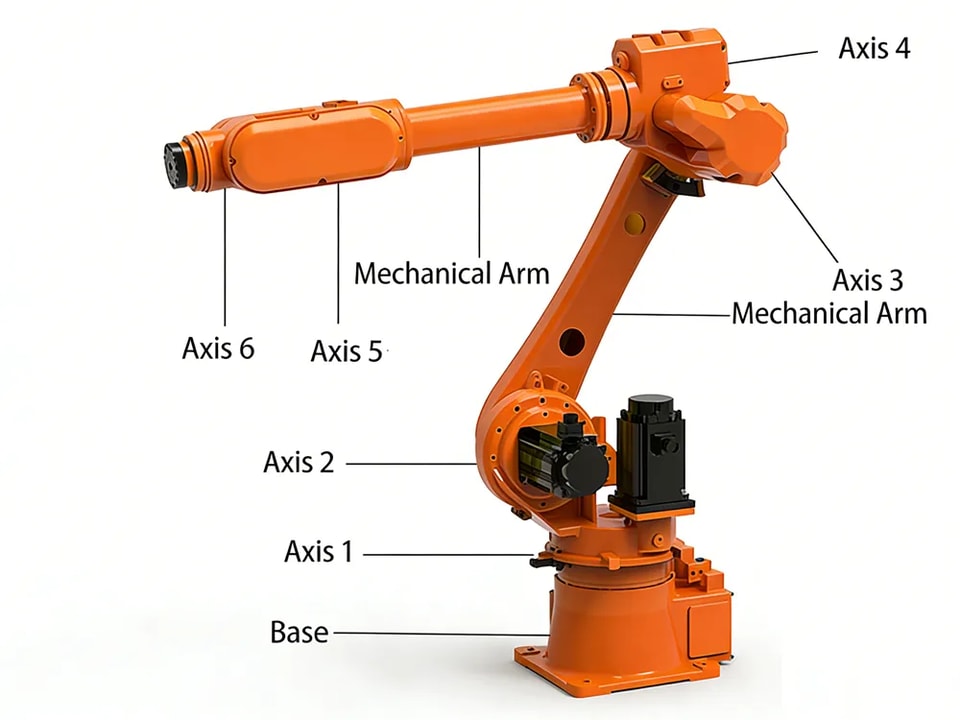
1. Partie d’actionnement : il s’agit de la structure mécanique qui transmet une force ou un couple et exécute des actions spécifiques pour accomplir la tâche de soudage. Elle comprend le corps du robot, le bras, le poignet et la main.

2. Partie de commande : il s’agit des composants électroniques et électriques ainsi que du système informatique chargés de contrôler la structure mécanique afin d’exécuter l’opération de soudage selon un programme et une trajectoire définis.

3. Section source d’énergie et transmission : cette section comprend les composants et dispositifs qui fournissent et transmettent l’énergie mécanique aux actionneurs. La source d’énergie est généralement électrique ou hydraulique.

4. Section d’assistance au procédé : elle comprend principalement l’alimentation de soudage du robot, le dévidoir de fil et le dispositif d’alimentation en gaz.

II. Sélection des degrés de liberté des robots de soudage
Le bras et le poignet d’un robot de soudage sont les composants de mouvement de base. Toute conception de bras robotisé comporte trois degrés de liberté afin de garantir que l’effecteur puisse atteindre n’importe quel point dans sa zone de travail. Les trois degrés de liberté du poignet sont des mouvements de rotation autour des trois axes de coordonnées mutuellement perpendiculaires X, Y et Z dans l’espace, communément appelés mouvements de roulis, tangage et lacet.